Inspired by the original OpenRov, using a mixture of COTS1 parts, and 3D printed components, I am designing a small Class I, Observation ROV2.

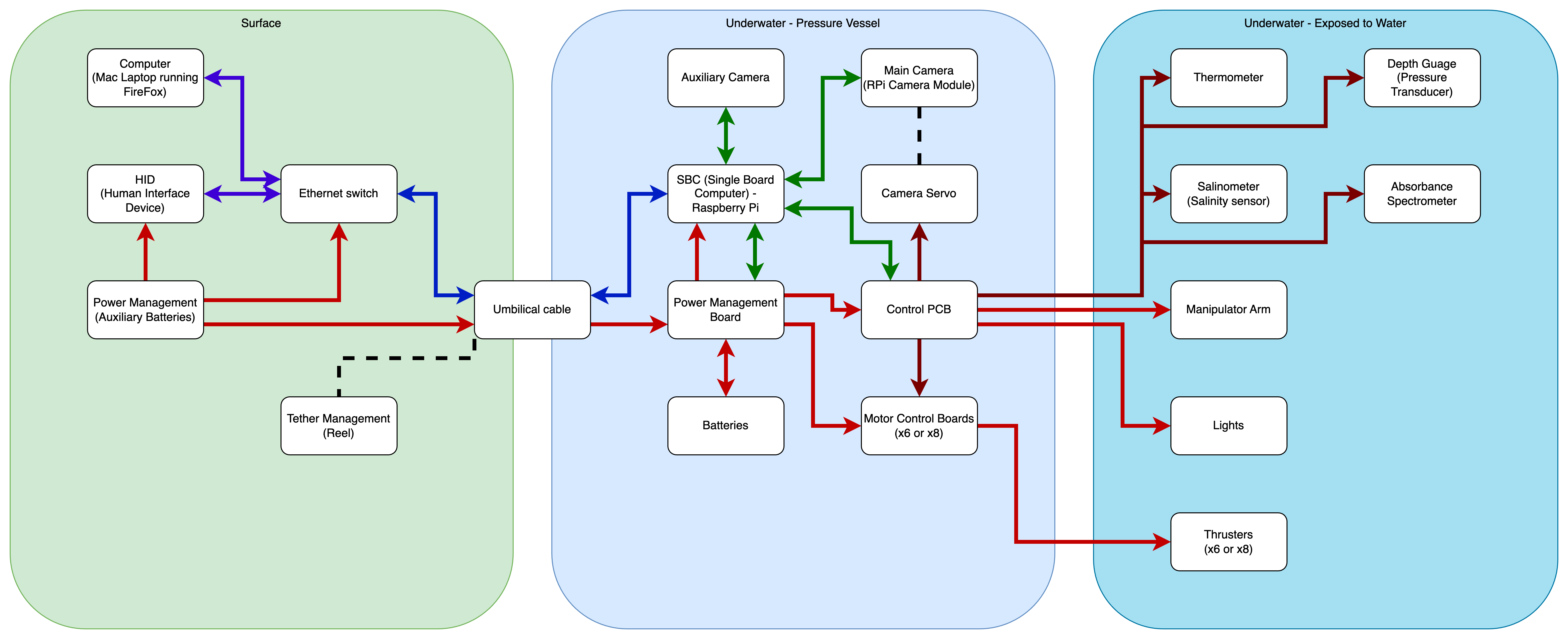
I am going to be using a Raspberry Pi, an Arduino, and RC components to build up the onboard control system. the data will be sent back to the control PC via ethernet.
Code and Project files can be found in my GitHub Repo: github.com/PhilipMcGaw/rov.
- DIY underwater ROV
 I can’t quite remember how long I have been interested in seeing what is under the water, I have been writing my thoughts about building an ROV on my old site for a while. I picked up a copy of the book, “The ROV Manual – A user guide for observation class remotely operated vehicles” by Robert D. Christ and Robert L. Wernli Sr. The book gives a lot of background about the different types of commercial ROVs, From this, it is obvious that I am going to be working on building an Observation class ROV. Since starting looking at… Read more: DIY underwater ROV
I can’t quite remember how long I have been interested in seeing what is under the water, I have been writing my thoughts about building an ROV on my old site for a while. I picked up a copy of the book, “The ROV Manual – A user guide for observation class remotely operated vehicles” by Robert D. Christ and Robert L. Wernli Sr. The book gives a lot of background about the different types of commercial ROVs, From this, it is obvious that I am going to be working on building an Observation class ROV. Since starting looking at… Read more: DIY underwater ROV - Pressure VesselSince the electronics on my Remote Control ROV will be underwater, they need to be isolated from the water, and the subsequent water pressure, for this I am going to use a pressure vessel. There is a commercial product the “SEAWOLF Ocean Master” that looks like it has a transparent acrylic pressure vessel. The basic design for my pressure vessel is to be a tube of about 100 mm in diameter, the length of which is determined by the length of the side pieces of my ROV, in this instance it is 400 mm. The minimum internal diameter is constrained… Read more: Pressure Vessel
- ROV Viewport DomeFurther to my last post, where I was using “Under Pressure” by Deepsea to work out the performance of materials for the main pressure vessel of my ROV. I am going to look at the performance of the Viewport Dome. Since the viewport needs to be optically clear this discounts metals like steel or aluminium. Glass is not a material that I really like the idea of using, this leaves clear plastic. 100 mm diameter acrylic domes are available on eBay. I already have one, and it’s about 3mm thick clear acrylic. I have already drilled the 20 M4 (4.2… Read more: ROV Viewport Dome
- ROV Pressure Vessel end cap and feed-throughsIn my previous two posts, Pressure Vessel and the Viewport, I talked about using the software “Under Pressure” by Deepsea to work out the performance of the Pressure Vessel tube, and the Viewport for my ROV. it’s now time to work out the performance of the end cap which holds the feed-throughs. The endcap is a simple bit of flat stock that interfaces with the flange and has several penetrations to allow the feed-throughs to carry wires from the pressure vessel to the free-flooded area. There are 10 holes sized for M10 bolts. End Cap Material Choices Since a flat… Read more: ROV Pressure Vessel end cap and feed-throughs